# Pixhawk 3 Pro
警告
PX4 不生产这种(或任何)自动驾驶仪。请联系 生产商 (打开新窗口) 硬件支持或合规问题。
Pixhawk® 3 Pro 基于 FMUv4 硬件设计(Pixracer),并进行了一些升级和增加了一些功能。电路板由 Drotek® (打开新窗口) 和 PX4。

备注
主要硬件文档在这里: https://drotek.gitbook.io/pixhawk-3-pro/hardware
TIP
该自动驾驶仪 支持 由 PX4 维护和测试小组负责。
# 快速总结
- 微控制器: STM32F469闪存大小为 2MiB,内存大小为 384KB
- ICM-20608-G 陀螺仪/加速度计
- MPU-9250 陀螺仪/加速度计/磁力计
- LIS3MDL 指北针
- 通过两条 SPI 总线(一条高速总线和一条低噪声总线)连接传感器
- 两条 I2C 总线
- 两条 CAN 总线
- 两个电源模块的电压/电池读数
- FrSky® 逆变器
- 8 路主 PWM 输出 + 6 路辅助 PWM 输出(独立 IO 芯片,PX4IO)
- microSD (记录)
- S.BUS / Spektrum / SUMD / PPM 输入
- JST GH 用户友好型连接器:与 Pixracer 相同的连接器和引脚分配
# 购买地点
来自 Drotek 商店 (打开新窗口) (欧盟) :
来自 readymaderc (打开新窗口) (美国) :
# 构建固件
TIP
大多数用户无需构建此固件!它已预置并由 QGroundControl 当连接了适当的硬件时。
至 建造 PX4 为这一目标:
make px4_fmu-v4pro_default
# 调试端口
如下图所示,电路板有 FMU 和 IO 调试端口。
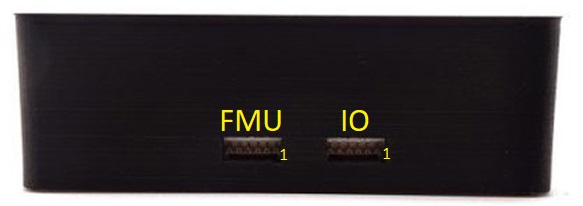
引脚分配和连接器符合 Pixhawk 标准调试端口 (打开新窗口) (JST SM06B 连接器)。
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | Vcc 目标移位 | +3.3V |
| 2(黑色) | 控制台发送(输出) | +3.3V |
| 3(黑色) | 控制台 RX(输入) | +3.3V |
| 4(黑色) | SWDIO | +3.3V |
| 5(黑色) | SWCLK | +3.3V |
| 6(黑色) | 接地 | 接地 |
有关该端口的布线和使用信息,请参见:
- PX4 系统控制台 (注意,FMU 控制台映射到 UART7)。
- SWD (JTAG) 硬件调试接口
# 串行端口映射
| UART | 设备 | 港口 |
|---|---|---|
| UART1 | /dev/ttyS0 | 无线网络 |
| USART2 | /dev/ttyS1 | TELEM1(流量控制) |
| USART3 | /dev/ttyS2 | TELEM2(流量控制) |
| UART4 | ||
| UART7 | 控制台 | |
| UART8 | 序号4 |