# ROS 2 用户指南(PX4-ROS 2 桥接器)
本主题介绍如何在 PX4 中设置和使用 ROS 2。
它概述了 ROS2-PX4 桥接架构和应用管道,以及如何安装所有所需软件和构建 ROS 2 应用程序的说明。
备注
任何在 DDS 域(包括 ROS 节点)中运行和链接的应用程序都可以利用 PX4 自动驾驶仪中的快速 DDS 接口。
有关使用 微型 RTPS 桥接器 如果没有 ROS 2,请参阅 RTPS/DDS 接口部分.
备注
有关如何将 PX4 与 ROS 2 结合使用的更详细、更直观的说明,请参阅 PX4 维护者的介绍:
# 概述
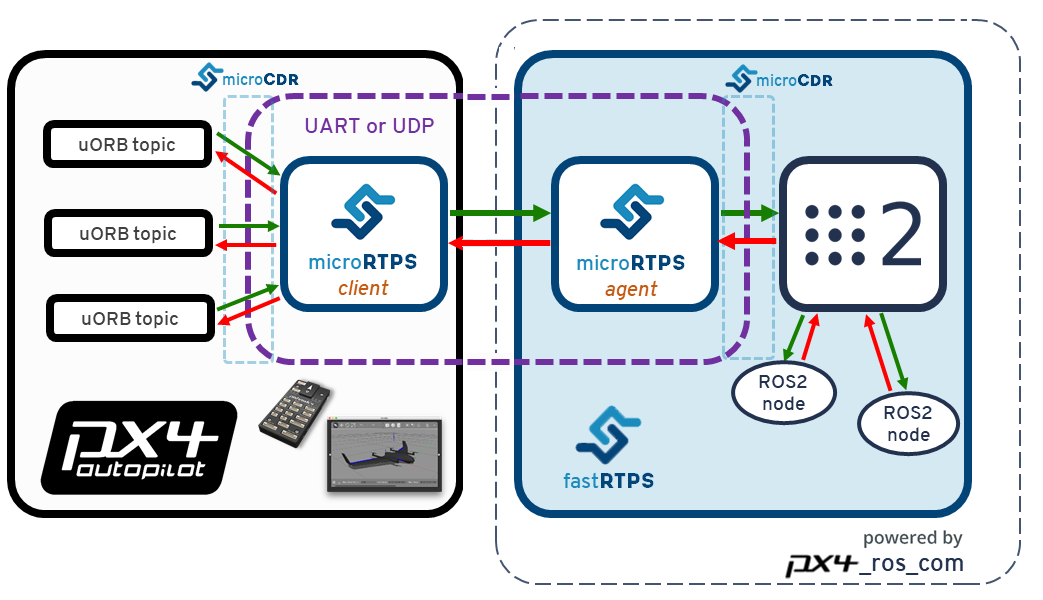
得益于本地通信中间件(DDS/RTPS),ROS 2 的应用管道非常简单。其 microRTPS 桥接器 它包括一个运行在 PX4 上的客户端和一个运行在 ROS 计算机上的代理,两者通过通信在 UORB 和 ROS 2 信息格式之间提供双向信息转换。这样就可以创建 ROS 2 监听器或广告节点,直接发布和订阅 PX4 UORB 数据!如下图所示。
ROS 2 使用 px4_msgs (打开新窗口) 和 px4_ros_com (打开新窗口) 软件包,以确保在创建客户端和代理代码时使用匹配的消息定义(这一点很重要),同时还能在构建 ROS 代码时取消对 PX4 的要求。
px4_msgs包含 PX4 客户端消息定义。构建该项目时,它会生成相应的 ROS 2 兼容 IDL 文件。px4_ros_com建立px4_msgs项目,然后使用生成的 IDL 文件创建(并构建)ROS 2 代理。
PX4 自动驾驶仪项目自动更新 px4_msgs (打开新窗口) 主分支)中的新信息定义。
备注
ROS 应用程序可以访问的 uORB 主题子集可参见 px4_msgs/msg (打开新窗口).
PX4 固件包含一个基于其构建时消息定义的 microRTPS 客户端。精明的读者会注意到,生成的代理可能不是根据同一套定义构建的(除非它们都是根据相同的 "主 "提交构建的)。现在这还不是问题,因为 PX4 消息集/定义相对稳定。在不久的将来,我们将创建与特定 PX4 版本相匹配的分支。
警告
虽然 microRTPS 客户端相同,但 ROS 2 使用的 IDL 文件与普通 DDS 使用的 IDL 文件略有不同。我们使用 px4_msg 生成相应的 IDL 文件。
# 安装和设置
要设置 ROS 2 以与 PX4 配合使用,您需要
# 安装快速 DDS
按照 快速 DDS 安装指南 安装 快速 RTPS(DDS) 2.0.0 (或更高版本)和 Fast-RTPS-Gen 1.0.4 (不是以后!)及其依赖关系。
备注
检查指南以确认最新的依赖关系!在正确版本的 快速 RTPS(DDS) 和 **Fast-RTPS-Gen 已安装。
# 安装 ROS 2
备注
本安装和构建指南涵盖 Ubuntu 20.04 中的 ROS 2 Foxy。
安装 ROS 2 及其依赖项:
安装过程还应安装
胶管不过,如果没有,你也可以手动安装这些工具:苏都 适切 安装 python3-colcon-common-extensionseigen3_cmake_module也是必需的,因为 Eigen3 用于变换库:苏都 适切 安装 ros-foxy-eigen3-cmake 模块还必须安装一些 Python 依赖项(使用
核心或适切):苏都 管道3 安装 -U empy pyros-genmsg setuptools
# 构建 ROS 2 工作区
本节将介绍如何创建一个 ROS 2 工作区,将其托管在你的 主目录 (根据需要修改命令,将源代码放在其他地方)。命令 px4_ros_com 和 px4_msg 软件包克隆到工作区文件夹,然后使用脚本构建工作区。
备注
构建过程将在控制台上打开新的标签页,这些标签页与构建过程的不同阶段相对应,这些阶段需要获取不同的环境配置。
创建和构建工作区:
- 使用
$ mkdir -p ~/px4_ros_com_ros2/src - 克隆 ROS 2 桥接软件包
px4_ros_com和px4_msgs到/src目录(该师默认情况下会克隆分支):$ Git 克隆 https://github.com/PX4/px4_ros_com.git ~/px4_ros_com_ros2/src/px4_ros_com $ Git 克隆 https://github.com/PX4/px4_msgs.git ~/px4_ros_com_ros2/src/px4_msgs - 使用
build_ros2_workspace.bash脚本来构建 ROS 2 工作区(包括px4_ros_com和px4_msgs).$ CD ~/px4_ros_com_ros2/src/px4_ros_com/scripts $ 消息来源 build_ros2_workspace.bash
TIP
通过使用 --帮助 论点。特别是 --verbose 参数显示完整的 胶管 构建输出。
备注
px4_ros_com/scripts 目录中包含多个脚本,用于构建不同类型的工作区。
# 检查安装是否合理
检查安装/设置是否成功的方法之一是测试网桥是否能与 PX4 通信。我们可以通过在模拟器中运行 PX4 来实现这一目的。
设置 PX4 Ubuntu Linux 开发环境 - 根据默认说明获取最新版本的 PX4 源代码并安装所有需要的工具。
在 PX4 自动驾驶仪 项目,然后开始使用 PX4 Gazebo 仿真:
生产 PX4_SITL_RTPS 仿真场景GazeboPX4 完全启动后,终端将显示 NuttShell/系统控制台.
在一个 新 终端、
消息来源ROS 2 工作区,然后启动micrortps_agent守护进程,以 UDP 作为传输协议:$ 消息来源 ~/px4_ros_com_ros2/install/setup.bash $ micrortps_agent -t UDP在原始终端(系统控制台)上启动
micrortps_client守护进程:pxh>; micrortps_client start -t UDP打开一个新终端,使用提供的启动文件启动监听器:
$ 消息来源 ~/px4_ros_com_ros2/install/setup.bash $ ros2 launch px4_ros_com sensor_combined_listener.launch.py如果网桥工作正常,您就可以在启动 ROS 监听器的终端/控制台上看到打印的数据:
传感器接收到的综合数据 ================================ ts: 870938190 陀螺仪[0]: 0.00341645 陀螺仪[1]: 0.00626475 陀螺仪[2]: -0.000515705 gyro_integral_dt: 4739 相对加速度计时间戳: 0 加速度计_m_s2[0]: -0.273381 加速度计_m_s2[1]: 0.0949186 加速度计_m_s2[2]: -9.76044 加速度计积分 dt: 4739
您还可以使用 ros2 主题 hz.例如 综合传感器 使用 ros2 主题 hz /SensorCombined_PubSubTopic:
平均率: 248.187
分钟 0最多 0.000 秒: 0.012s std dev: 0.00147 秒窗口: 2724
平均率: 248.006
分钟 0最多 0.000 秒: 0.012s std dev: 0.00147 秒窗口: 2972
平均率: 247.330
分钟 0最多 0.000 秒: 0.012s std dev: 0.00148s 窗口: 3212
平均率: 247.497
分钟 0最多 0.000 秒: 0.012s std dev: 0.00149 秒窗口: 3464
平均率: 247.458
分钟 0最多 0.000 秒: 0.012s std dev: 0.00149 秒窗口: 3712
平均率: 247.485
分钟 0最多 0.000 秒: 0.012s std dev: 0.00148s 窗口: 3960
# ROS 2 应用实例
# 创建 ROS 2 监听器
随着 px4_ros_com 现在,我们可以利用生成的 microRTPS 代理应用程序,以及来自 px4_msgs代表与 uORB 对应的一对一匹配。
要在 ROS 2 上创建一个监听节点,让我们以 sensor_combined_listener.cpp 节点下 px4_ros_com/src/examples/listeners.
代码首先导入与 ROS 2 中间件连接所需的 C++ 库和所需的消息头文件:
#包括 <rclcpp/rclcpp.hpp>;
#包括 <px4_msgs/msg/sensor_combined.hpp>;
然后创建一个 传感器组合监听器 类的子类。 rclcpp::Node 基类。
/** * @brief 传感器组合 uORB 主题数据回调 */
类 传感器组合监听器 : 公 rclcpp::节点
{
会创建一个回调函数,当 综合传感器 接收 uORB 报文(现在是 RTPS/DDS 报文),并在每次接收报文时输出报文字段的内容。
公:
不含糊 传感器组合监听器() : 节点("sensor_combined_listener";) {
订阅_ = 此->;创建订阅<;px4_msgs::信息::传感器组合>;(
"SensorCombined_PubSubTopic";,
10,
[此](缢 px4_msgs::信息::传感器组合::UniquePtr msg) {
标准::cout <<; "\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n";
标准::cout <<; "接收到的传感器综合数据"; <<; 标准::endl;
标准::cout <<; "=============================" <<; 标准::endl;
标准::cout <<; ts: "; <<; 信息->;时戳 <<; 标准::endl;
标准::cout <<; "gyro_rad[0]:"; <<; 信息->;陀螺仪[0] <<; 标准::endl;
标准::cout <<; "gyro_rad[1]: "; <<; 信息->;陀螺仪[1] <<; 标准::endl;
标准::cout <<; "gyro_rad[2]: "; <<; 信息->;陀螺仪[2] <<; 标准::endl;
标准::cout <<; "gyro_integral_dt: "; <<; 信息->;陀螺积分 <<; 标准::endl;
标准::cout <<; "accelerometer_timestamp_relative: "; <<; 信息->;相对加速度计时间戳 <<; 标准::endl;
标准::cout <<; "accelerometer_m_s2[0]: "; <<; 信息->;加速度计_m_s2[0] <<; 标准::endl;
标准::cout <<; "加速度计_m_s2[1]: "; <<; 信息->;加速度计_m_s2[1] <<; 标准::endl;
标准::cout <<; "accelerometer_m_s2[2]: "; <<; 信息->;加速度计_m_s2[2] <<; 标准::endl;
标准::cout <<; "accelerometer_integral_dt: "; <<; 信息->;加速度计积分 <<; 标准::endl;
});
}
以下各行创建了对 传感器综合主题 可与一个或多个兼容的 ROS 发布者相匹配。
私人:
rclcpp::订阅<;px4_msgs::信息::传感器组合>;::SharedPtr subscription_;
};
的实例化 传感器组合监听器 类作为 ROS 节点是在 主要 功能。
int 主要(int 参数, 烧焦 *参数[])
{
标准::cout <<; "Starting sensor_combined listener node..."; <<; 标准::endl;
setvbuf(数据输出, NULL, _IONBF, BUFSIZ);
rclcpp::启动(参数, 参数);
rclcpp::后旋(标准::共享<;传感器组合监听器>;());
rclcpp::关闭();
返回 0;
}
# 创建 ROS 2 广告客户
ROS 2 广告节点向 DDS/RTPS 网络(也就是 PX4 自动驾驶仪)发布数据。
例如 debug_vect_advertiser.cpp 根据 px4_ros_com/src/advertisers首先,我们导入所需的头文件,包括 debug_vect msg 标头。
#包括 时间顺序<chrono>;
#包括 <rclcpp/rclcpp.hpp>;
#包括 <px4_msgs/msg/debug_vect.hpp>;
使用 命名空间 标准::计时器;
然后,代码会创建一个 DebugVectAdvertiser 类的子类。 rclcpp::Node 基类。
类 DebugVectAdvertiser : 公 rclcpp::节点
{
下面的代码为何时发送信息创建了一个函数。信息根据定时回调发送,该回调根据定时器每秒发送两条信息。
公:
DebugVectAdvertiser() : 节点("debug_vect_advertiser";) {
出版商_ = 此->;创建出版商<;px4_msgs::信息::调试向量>;("DebugVect_PubSubTopic";, 10);
汽车 定时器回调 =
[此]()->;空白 {
汽车 debug_vect = px4_msgs::信息::调试向量();
debug_vect.时戳 = 标准::计时器::时间点播报<;标准::计时器::微秒>;(标准::计时器::稳定时钟::现在()).自时间起().计数();
标准::字符串名称 = "测试";;
标准::抄袭(名字.兴办(), 名字.最后(), debug_vect.名字.兴办());
debug_vect.x = 1.0;
debug_vect.y = 2.0;
debug_vect.z = 3.0;
RCLCPP_INFO(此->;get_logger(), "\033[97m Publishing debug_vect: time: %llu x: %f y: %f z: %f \033[0m";,
debug_vect.时戳, debug_vect.x, debug_vect.y, debug_vect.z);
此->;出版商_->;发布(debug_vect);
};
定时器 = 此->;创建隔离墙计时器(500毫秒, 定时器回调);
}
私人:
rclcpp::定时器基数::SharedPtr timer_;
rclcpp::出版商<;px4_msgs::信息::调试向量>;::SharedPtr publisher_;
};
的实例化 DebugVectAdvertiser 类作为 ROS 节点是在 主要 功能。
int 主要(int 参数, 烧焦 *参数[])
{
标准::cout <<; "Starting debug_vect advertiser node..."; <<; 标准::endl;
setvbuf(数据输出, NULL, _IONBF, BUFSIZ);
rclcpp::启动(参数, 参数);
rclcpp::后旋(标准::共享<;DebugVectAdvertiser>;());
rclcpp::关闭();
返回 0;
}
# 机外控制
有关如何在 PX4 上使用板外控制的完整参考示例,请参阅: ROS 2 机外控制示例.
# 手动工作区设置(仅供参考)
备注
本手册旨在帮助您更好地了解构建过程。构建或使用 ROS 2 不需要它。 ros1_桥 软件包,在 通过 ROS 2 桥接的 ROS (1).
本节介绍了 人工 设置您的工作区并构建 px4_ros_com, px4_msgs和 ros1_桥 包装。该主题有效地解释了 build_ros2_workspace.bash 脚本中的 安装说明).
仅构建 ROS 2 工作区:
CD成px4_ros_com_ros2目录中的 ROS 2 环境源代码。如果它告诉你之前已经设置了一个工作区,请不要介意:CD ~/px4_ros_com_ros2 消息来源 /opt/ros/foxy/setup.bash建立工作区:
colcon build --symlink-install --event-handlers console_direct+
同时建立 ROS 2 和 ROS (1) 工作区(替换前面的步骤):
CD成px4_ros_com_ros2目录中的 ROS 2 环境源代码。如果它告诉你之前已经设置了一个工作区,请不要介意:消息来源 /opt/ros/foxy/setup.bash克隆
ros1_桥软件包,以便在 ROS 2 工作区中构建:Git clone https://github.com/ros2/ros1_bridge.git -b dashing ~/px4_ros_com_ros2/src/ros1_bridge建立
px4_ros_com和px4_msgs软件包,不包括ros1_桥包装colcon build --symlink-install --packages-skip ros1_bridge --event-handlers console_direct+备注
--事件处理程序 console_direct+只是为了增加胶管如果想要更安静的构建过程,可以将其移除。然后构建 ROS(1) 软件包。首先打开一个 新 终端窗口,并调用系统上安装的 ROS(1) 环境:
消息来源 /opt/ros/melodic/setup.bash建立
px4_ros_com和px4_msgsROS 端上的软件包(使用上一步打开的终端):CD ~/px4_ros_com_ros1 &&; colcon build --symlink-install --event-handlers console_direct+打开另一个新终端,然后按以下顺序为环境和工作区添加源代码:
消息来源 ~/px4_ros_com_ros1/install/setup.bash 消息来源 ~/px4_ros_com_ros2/install/setup.bash最后,建立
ros1_桥:CD ~/px4_ros_com_ros2 &&; colcon build --symlink-install --packages-select ros1_bridge --cmake-force-configure --event-handlers console_direct+备注
构建过程可能会消耗大量内存资源。在资源有限的机器上,减少并行处理的作业数量(例如,设置环境变量
MAKEFLAGS=-j1).有关构建过程的更多详情,请参阅 ros1_桥 (打开新窗口) 包装页。
# 清洁工作区
在构建工作区后,必须先删除许多文件,然后才能进行清理/重新构建(例如,在更改了某些代码后,想要重新构建)。
不幸的是 胶管 目前没有办法清理生成的 构建, 安装 和 登录 目录,因此必须手动删除这些目录。
clean_all.bash 脚本 px4_ros_com/scripts)可简化清理过程,该脚本可用于清理上述所有工作区选项(ROS 2、ROS 1 和两者)。
最常见的使用方法是将 ROS (1) 工作区目录路径传给它(因为它通常不在默认路径上):
$ 消息来源 clean_all.bash --ros1_ws_dir <;path/to/px4_ros_com_ros1/ws>;
TIP
与构建脚本一样, clean_all.bash 脚本也有一个 --帮助 指导。