# 机外控制
警告
机外控制 是危险的。开发人员有责任确保在机外飞行前进行充分准备、测试和采取安全预防措施。
离机控制的原理是使用自动驾驶仪之外的软件来控制 PX4 飞行算法池。这是通过 MAVLink 协议,特别是 设置目标位置 (打开新窗口) 和 设置目标姿态 (打开新窗口) 留言
# 板外控制固件设置
在开始板外开发之前,您需要在固件方面设置两件事。
# 将遥控开关映射到离机模式激活
为此,请在 QGroundControl 并查找 RC_MAP_OFFB_SW 参数,您可以为其分配用于激活离板模式的遥控通道。当您从离板模式中退出时,就会进入位置控制模式,这样的映射方式可能非常有用。
虽然这一步不是必须的,因为您可以使用 MAVLink 消息激活离机模式。我们认为这种方法更为安全。
# 启用配套计算机接口
在连接到配套计算机的串行端口上启用 MAVLink(请参阅 "MAVLink")。 配套电脑设置).
# 硬件设置
通常,有三种设置机外通讯的方法。
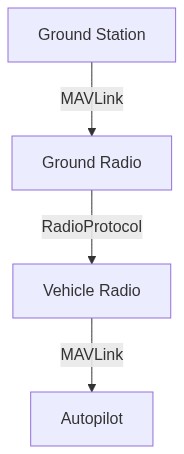
# 串行无线电
- 一个连接到自动驾驶仪的 UART 端口
- 一台连接地面站计算机
收音机示例包括
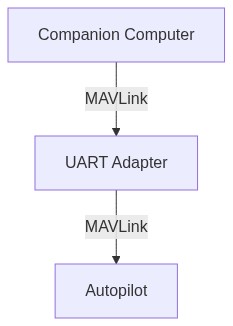
# 机载处理器
安装在载具上的小型计算机,通过 UART 转 USB 适配器与自动驾驶仪连接。除了向自动驾驶仪发送指令外,还可以进行其他车载处理。
小型低功耗范例:
较大的高功率示例:
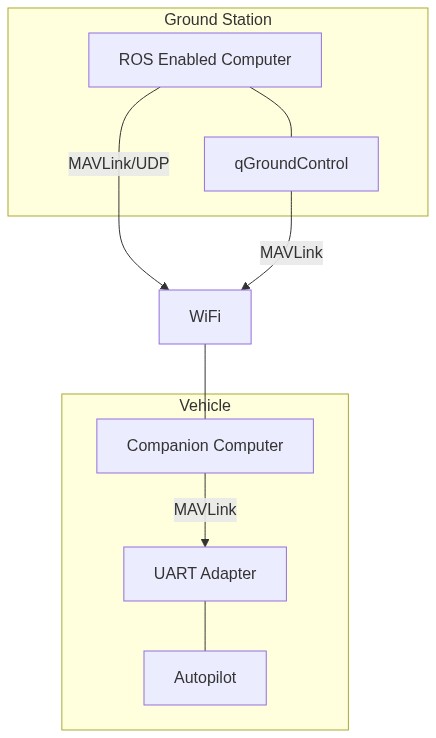
# 板载处理器和与 ROS (推荐)
安装在载具上的小型计算机,通过 UART 转 USB 适配器与自动驾驶仪连接,同时通过 WiFi 与运行 ROS 的地面站连接。这可以是上一节中任何一台配有 WiFi 适配器的计算机。例如,英特尔 NUC D34010WYB 有一个 PCI Express 半微型连接器,可容纳一个 WiFi 适配器。 英特尔 Wifi Link 5000 (打开新窗口) 适配器。
← 维护 ROS 2 用户指南 →