# 飞行模式
飞行模式 定义了自动驾驶仪如何响应用户输入并控制载具运动。它们大致分为 手册, 受助 和 汽车 根据自动驾驶仪提供的控制水平/类型,可选择不同的飞行模式。驾驶仪可通过遥控器上的开关或地面控制站在不同飞行模式之间进行切换。
并非所有飞行模式都适用于所有类型的飞行器,有些模式在不同类型飞行器上的表现也不同(如下所述)。最后,有些飞行模式只有在特定的飞行前和飞行中条件下(如 GPS 锁定、空速传感器、沿轴的飞行器姿态感应)才有意义。在满足适当条件之前,系统不允许过渡到这些模式。
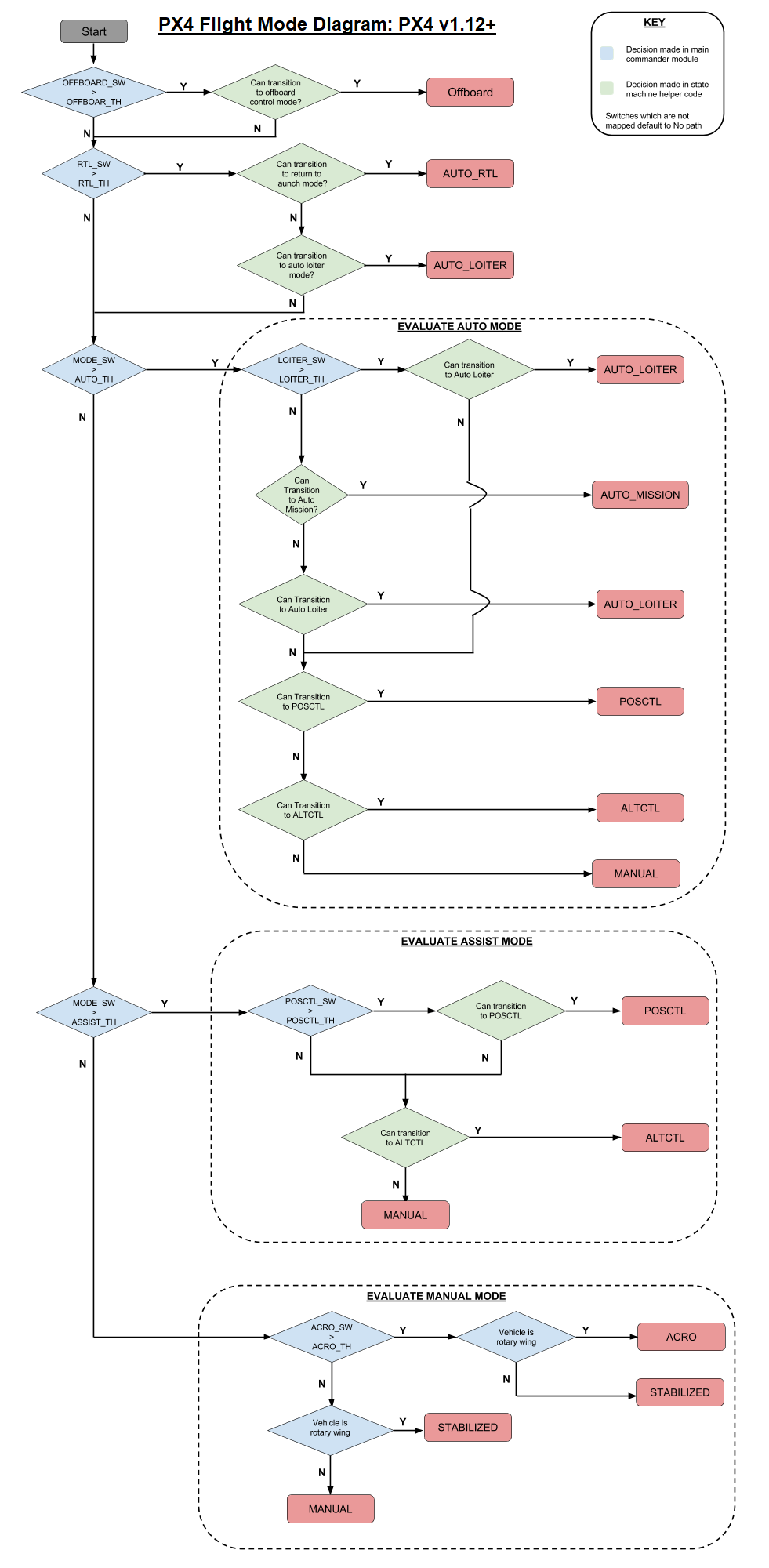
以下各节概述了各种模式,然后是 飞行模式评估图 显示 PX4 在什么条件下会过渡到新模式。
# 飞行模式概要
# 手动飞行模式
手动模式是指用户通过遥控器(或操纵杆)直接控制飞行器的模式。飞行器的移动始终跟随操纵杆的移动,但响应的级别/类型会根据模式的不同而有所变化。例如,经验丰富的飞行者可以使用将摇杆位置直接传递到推杆的模式,而初学者通常会选择对摇杆位置的突然变化反应较慢的模式。
漫游车/船:
- 手动/稳定/近摄 驾驶仪的控制输入(来自遥控发射机的原始用户输入)直接传递到输出混频器。
固定翼飞机:
- 手册: 驾驶仪的控制输入(来自遥控发射机的原始用户输入)直接传递到输出混频器。
- 稳定: 驾驶仪的俯仰和滚转输入作为角度指令传递给自动驾驶仪,而偏航输入则通过输出混合器直接发送给方向舵(手动控制)。如果遥控滚转杆和俯仰杆居中,自动驾驶仪会将滚转角和俯仰角调节为零,从而稳定(拉平)姿态,抵御任何风力干扰。不过,在这种模式下,飞行器的位置不受自动驾驶仪控制,因此位置可能会随风漂移。在非零滚转输入的情况下,飞行器进行协调转弯,以实现零侧滑(Y 方向(侧向)的加速度为零)。在协调转弯过程中,方向舵用于控制侧滑,任何手动偏航输入都会添加到侧滑中。
- ACRO: 驾驶仪的输入以滚转、俯仰和偏航的形式传递 费率 向自动驾驶仪发出指令。自动驾驶仪控制角速度。节流阀直接传递到输出混合器。
多旋翼飞行器
手动/稳定 驾驶仪的输入以滚转和俯仰的形式传递 观点 命令和偏航 费率 指令。油门直接传递到输出混合器。自动驾驶仪控制姿态,这意味着当遥控杆居中时,它会将滚转角和俯仰角调节为零,从而使姿态趋于水平。不过,在这种模式下,飞行器的位置不受自动驾驶仪控制,因此位置可能会随风漂移。
备注
对于多旋翼飞行器,手动和稳定模式是相同的。
ACRO: 驾驶仪的输入以滚转、俯仰和偏航的形式传递 费率 向自动驾驶仪发出指令。自动驾驶仪控制角速度,但不控制姿态。因此,如果遥控杆居中,飞行器就不会平移。这使得多旋翼飞行器可以完全倒置。油门直接传递到输出混合器。
# 辅助飞行模式
辅助模式也由用户控制,但提供一定程度的自动辅助功能,例如自动保持位置/方向、逆风。辅助模式通常更容易获得或恢复可控飞行。
- ALTCTL (高度控制)
- 固定翼飞机: 当滚转、俯仰和偏航(RPY)遥控杆全部居中(或小于某个指定的死区范围)时,飞机将恢复直线和水平飞行,并保持当前高度。其 x 和 y 位置将随风漂移。
- 多旋翼飞行器 滚转、俯仰和偏航输入与稳定模式相同。油门输入指示以预定的最大速度爬升或下沉。油门有较大的死区。居中油门可保持高度稳定。自动驾驶仪仅控制高度,因此飞行器的 x、y 位置可能会随风漂移。
- POSCTL (位置控制)
- 固定翼飞机: 中位输入(遥控杆居中)可实现水平飞行,必要时还会逆风飞行以保持直线。
- 多旋翼飞行器 滚动控制左右速度,俯仰控制地面前后速度。偏航控制偏航率,与手动模式相同。油门控制爬升/下降速度,与 ALTCTL 模式相同。这意味着当滚转、俯仰和油门杆对中时,飞行器的 x、y、z 位置将由自动驾驶仪保持稳定,不受任何风力干扰。
# 自动飞行模式
自动"模式是指控制器几乎不需要用户输入(例如起飞、着陆和飞行任务)。
- 自动LOITER (装载)
- 固定翼飞机: 飞机以当前高度(或略高于当前高度,适合 "我正在失去它")在当前位置附近徘徊。
- 多旋翼飞行器 多旋翼飞行器在当前位置和高度悬停/徘徊。
- AUTO_RTL (返回发射)
- 固定翼飞机: 飞机返回原点,并在原点上空盘旋。
- 多旋翼飞行器 多旋翼飞行器在当前高度上直线返回(如果当前高度高于原点位置 +)。 RTL_RETURN_ALT)或在 RTL_RETURN_ALT 如果 RTL_RETURN_ALT 高于当前高度),然后自动降落。
- 自动发送 (使命)
- 所有系统类型: 飞机服从地面控制站(GCS)发送的程序任务。如果没有收到任务,飞机将在当前位置 LOITER。
- 离岸 (机外)在这种模式下,位置、速度或姿态参考/目标/设定点由通过串行电缆和 MAVLink 连接的配套计算机提供。机外设定点可由以下应用程序接口提供 MAVSDK (打开新窗口) 或 马弗罗斯 (打开新窗口).
# 飞行模式评估图