# ThunderFly Auto-G2 自动飞行器
ThunderFly Auto-G2 是一种由自动驾驶仪控制的自动旋翼机,基于 Durafly™ Auto-G2 陀螺仪 (打开新窗口) 遥控模型,用 3D 打印模型替代了原模型的几个部件。

备注
Auto-G2 自动旋翼机的机身由 ThuderFly s.r.o. 公司开发和维护。
所有新增部分均可在 GitHub (打开新窗口) 作为一个开源项目。打印部件是在 OpenSCAD (打开新窗口).
# 修改
Durafly Auto-G2 的原始设计是一个三叶片旋翼,叶片长 400 毫米,外形为克拉克-Y 型。旋翼头只允许在滚动轴上倾斜。自动旋翼机由方向舵和升降舵控制。Durafly Auto-G2 自动旋翼机包装盒包含自动旋翼机的聚苯乙烯机身、电调、电机(可能为 800kV)、4 个舵机、尾翼、3 片带旋翼中心部件的桨叶、线底盘和预旋转器。
对 Durafly 模型的修改如下:
- 增加自动驾驶仪
- 具有两个自由轴(俯仰、滚动)的转子头
- 双叶转子,带可安全破碎的转子板
- 更大的起落架
# 自动驾驶仪
改装后的飞机已经相当重了。因此,建议使用重量较轻的飞行控制器(例如 Holybro pix32 或 纳米 CUAV).
自动驾驶仪应安装在自动飞行器底部的 3D 打印阻尼垫上。我们使用了 物联网 (打开新窗口)
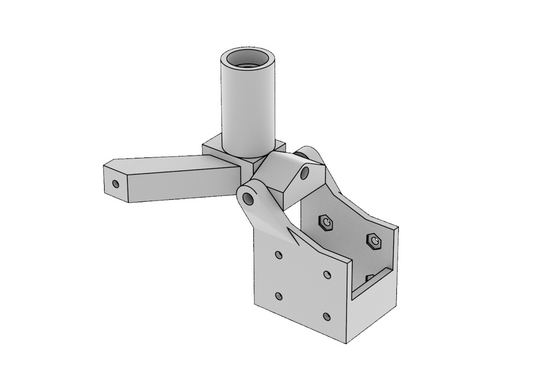
# 转子头
与最初的自动旋翼机相比,旋翼头经过改装,可以在滚动轴和俯仰轴上运动。因此,旋翼可以控制自动旋翼机的转弯和爬升。与原来的方向舵和升降舵控制相比,即使在低空速度情况下,也可以通过旋翼控制自动旋翼机的方向。
打印的旋翼头由三部分组成。底部使用 M2.5 螺钉固定在原始胶合板塔架上。第一部分和第二部分之间用一个 M3x35 螺栓连接,形成俯仰轴自由度,第二部分和第三部分之间用一个 M3x30 螺栓连接,形成滚动轴自由度。后一个轴由一个 M3x30 螺丝和一个拧紧的自锁螺母组成。从转子一侧看,螺钉头部有一个大面积的垫圈。
转子轴由 M3x50 高强度螺钉制成,穿过第三部分。使用的轴承是 623 2Z C3 SKF。在这一部分的末端,通过 M2.5 螺丝将球杆连接到塔架底部的伺服器上。最好将这些原始伺服器更换为质量更好的伺服器,因为它们的性能较弱,而且在原始结构中它们会相互帮助。
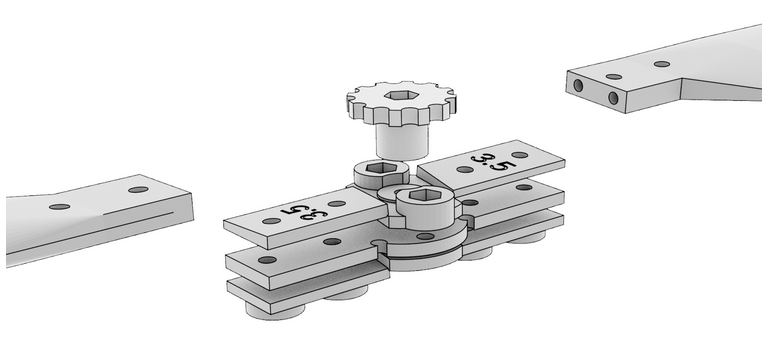
# 双叶转子
最初的 Durafly Auto-G2 自动旋翼机有一个三叶片旋翼,在此基础上进行了改装,使用双叶片旋翼。这样做的原因是为了减少振动和简化结构。打印的中央部件可与国产 Durafly 桨叶或 3D 打印桨叶一起使用。
转子的中心部分由多个部件组成,这些部件的作用如下:
- 它们使叶片能够拍打。
- 转子上有变形区,在撞击地面时会断裂。因此,转子通常只需更换一个部件即可快速修复。
- 刀片攻击角设置简单。
# HobbyKing 旋翼叶片
可以使用印制的转子中央部分和原装叶片。这些叶片可在 HobbyKing (打开新窗口).Hobbyking 刀片的重心位置各不相同,因此有必要对它们进行适当的平衡。
# 3D 打印旋翼
还可以打印转子叶片。
印刷转子叶片仍在开发中,但初步测试表明,它们的质量更好,这主要归功于其精确的形状和无纵向沟槽。不过,一些生产工艺仍需调整。
# 平衡
适当的叶片平衡对减少振动非常重要。叶片的平衡方式必须使重心位于转子轴线的中间。
印花刀片在生产过程中就已平衡,无需进一步平衡。
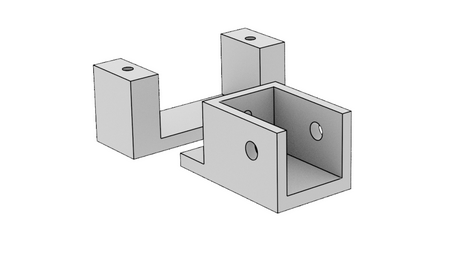
# 释放装置
如果您想使用绞盘发射自动旋翼机,或者想通过牵引发射自动旋翼机,您需要打印一个释放装置。这是一个装有伺服器的小盒子,可以拉出插销并释放绳索。
整个部件用热熔胶粘在自动旋翼机机身底部的发动机下方。如果用绳索牵引自动旋翼机,则不得打开发动机。例如,如果释放装置开关处于关闭状态,可以通过使发射器中的发动机输出无效来解决这个问题。
# 部件清单
# 电子设备
- 自动驾驶仪 (Holybro pix32, 纳米 CUAV)
- 全球定位系统(GPS Modul NEO-6M,带贴片天线)
- 空速传感器 (SDP3x (打开新窗口))
- 用更强的舵机代替原来的舵机(可选),(蓝鸟 BMS-125WV (打开新窗口))
- 用于释放装置的附加伺服(可选)
# 机械部件
- 转子头轴承(623 2Z C3)
- 螺旋桨 (装甲运兵车 10x7 (打开新窗口))
- 螺旋桨适配器 (打开新窗口)
# 可打印部件
转子头:
转子
转子叶片(可选)
自动驾驶仪支架
# 推荐备件
- 质量更好的伺服器(推荐 蓝鸟 BMS-125WV (打开新窗口)原装伺服器不太耐用))
- 螺旋桨 (装甲运兵车 10x7 (打开新窗口))
- 带变形区的转子中心板(3D 打印)
- 转子叶片 (HobbyKing (打开新窗口) 或 3D 打印)
# 视频
# 变化照片集




← 机身参考 X500(Pixhawk 4) →