# 在 Linux(包括 S.Bus)上连接遥控接收器
本主题介绍如何设置基于 Linux 的 PX4 自动驾驶仪,以连接和使用 支持的遥控接收器 任何串行端口上。
对于 S.Bus 以外的 RC 类型,可以将接收器直接连接到串行端口,或通过 USB 转 TTY 串行电缆(如 PL2302 USB 转串行 TTL 转换器)连接到 USB。
备注
对于 S.Bus 接收器(或编码器,如 Futaba、RadioLink 等),您通常需要通过一个 信号逆变电路除此之外,其他设置都是一样的。
那么 启动 PX4 RC 驱动程序 如下图所示。
# 启动驱动程序
要启动特定 UART 上的 RC 驱动程序(如本例中的 /dev/ttyS2):
rc_input start -d /dev/ttyS2
有关其他驱动程序的使用信息,请参见 rc_input.
# 信号逆变电路(仅限 S.Bus)
S.Bus 是一种 颠 UART 通信信号。
虽然某些串行端口/飞行控制器可以读取反相 UART 信号,但大多数情况下需要在接收器和串行端口之间安装信号反相电路,以解除信号反相。
TIP
通过串行端口或 USB 转TTY 串行转换器读取 S.Bus 远程控制信号也需要该电路。
本节将介绍如何创建适当的电路。
# 所需组件
- 1x NPN 晶体管(例如 NPN S9014 TO92)
- 1x 10K 电阻器
- 1x 1K 电阻器
备注
任何类型/型号的晶体管都可以使用,因为泄放电流非常低。
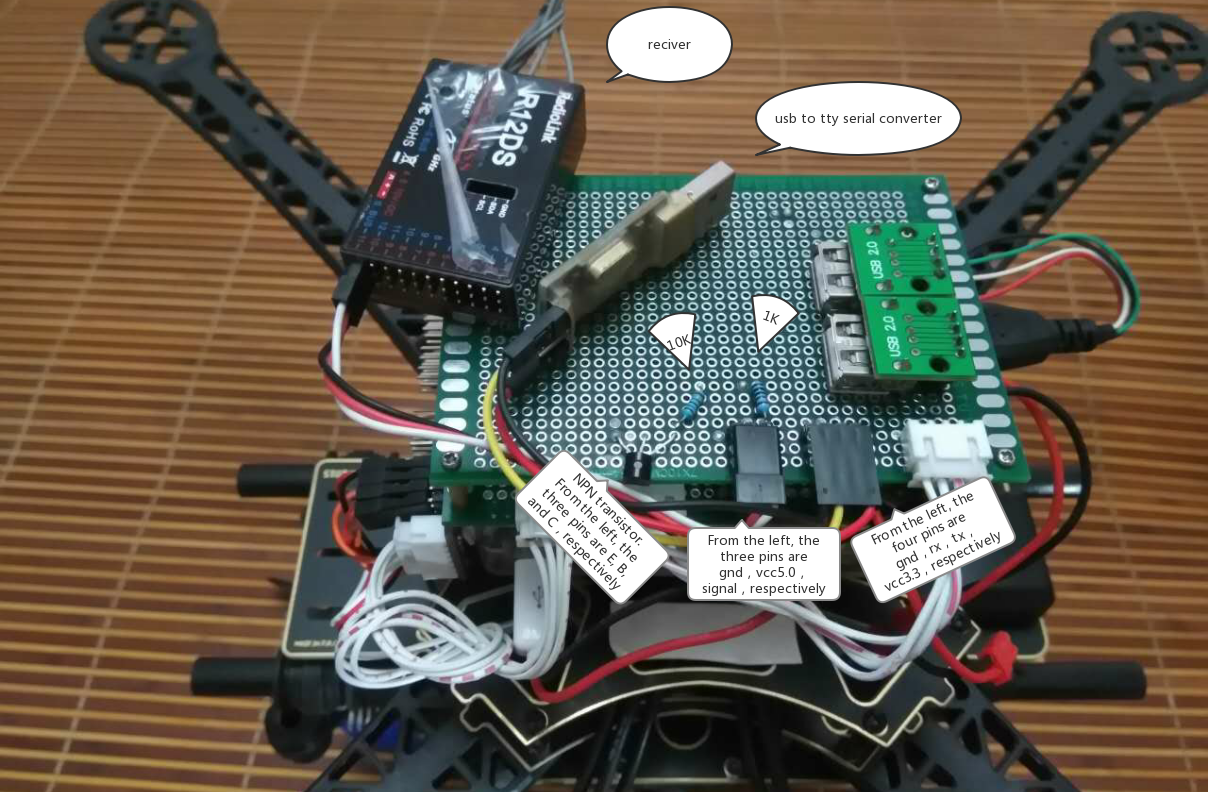
# 电路图/连接
按以下说明(和电路图所示)连接元件:
- 总线信号 → 1K 电阻器 → NPN 晶体管基极
- NPN 晶体管发射 → GND
- 3.3VCC → 10K 电阻器 → NPN 晶体管收集 → USB 转TTY rxd
- 5.0VCC → S.Bus VCC
- GND → S.Bus GND

下图显示了面包板上的连接。