# RTPS/DDS 接口:PX4-Fast RTPS(DDS)桥接器
PX4-Fast RTPS(DDS)桥接器也被称为 microRTPS 桥接器在 PX4 自动驾驶仪上增加了实时发布订阅(RTPS)接口,可以交换实时数据,从而使 PX4 自动驾驶仪的性能得到提高。 uORB 信息 各种 PX4 自动驾驶仪内部组件和(机载)外部组件之间的连接。 快速 DDS 实时应用。
这使我们能够更好地与在 DDS 域(包括 ROS 节点)中运行和链接的应用程序集成,从而轻松共享传感器数据、命令和其他载具信息。
下面的指南介绍了 RTPS/DDS 桥接架构,并向读者展示了如何编写一个简单的 快速 DDS 应用程序来订阅 PX4 自动驾驶仪的遥测更新。
备注
RTPS 是对象管理集团(OMG)数据分发服务(DDS)标准的基础协议。其目的是利用发布/订阅模式实现可扩展、实时、可靠、高性能和可互操作的数据通信。
快速 DDS 是 RTPS 协议/DDS 中间件最新版本的轻量级跨平台实现。它的前身是 快速 RTPS.
# 何时使用 RTPS?
当需要在飞行控制器和机外组件之间可靠地共享时间关键/实时信息时,应使用 RTPS。在机外软件需要成为飞行控制器和机外组件之间的 同龄人 在 PX4 中运行的软件组件(发送和接收 uORB 主题)。
可能的用例包括与用于计算机视觉的机器人库进行通信,以及对载具控制至关重要的执行器和传感器之间的实时数据通信。
快速 DDS 并不能替代 MAVLink。 MAVLink 仍然是与地面站、云台、摄像机和其他机外组件进行通信的最合适协议(尽管 快速 DDS 可能会为在更高频率下使用某些外设提供其他机会)。
TIP
在速度较慢的链路(如无线电遥测)上使用快速 RTPS(DDS)是可行的,但要注意链路的额外限制。请记住,遥测通道很容易超载。
# 建筑概览
# microRTPS 桥接器
microRTPS 桥接器在 PX4 和 DDS 参与者应用程序之间交换信息,在 PX4 和 DDS 之间进行无缝转换。 uORB 以及每个系统使用的 RTPS/DDS 报文。
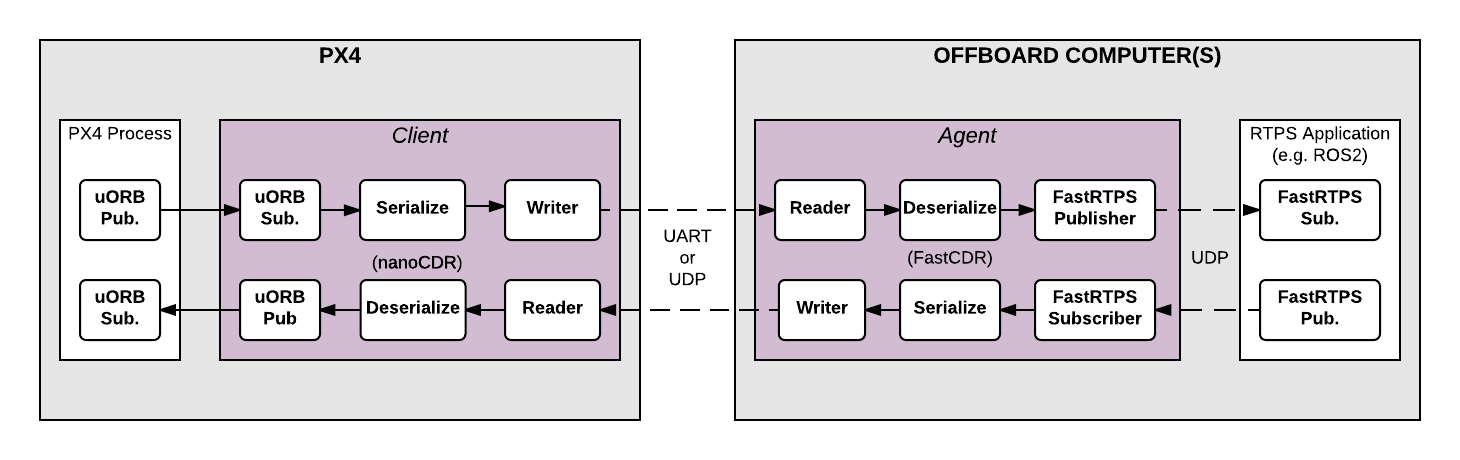
架构的主要元素是上图所示的客户端和代理进程。
# microRTPS 客户端
客户 是在飞行控制器上运行的 PX4 Autopilot 中间件守护进程。该客户端订阅其他 PX4 Autopilot 组件发布的 uORB 主题,并将任何更新发送至 代理 (通过 UART 或 UDP 端口),还可以接收来自 代理 并将其作为 uORB 信息发布到 PX4 自动驾驶仪。
# microRTPS 代理
代理 作为一个守护进程运行在机载计算机上(飞行控制器之外)。该代理从 客户 并通过 RTPS(重新)发布它们,还订阅来自其他 DDS 参与者应用程序的 RTPS/DDS 消息,并将它们转发到 客户.
# microRTPS 代理/客户端通信
代理 和 客户 通过串行链路(UART)或 UDP 网络连接,而 uORB 信息是 CDR 序列化 (打开新窗口) 在发送之前 (CDR 序列化 为不同平台之间交换串行数据提供了通用格式)。
代理 和任何 快速 DDS 应用程序通过 UDP 连接,可能在同一设备上,也可能在其他设备上。在典型的配置中,它们将在同一系统上(如开发计算机、Linux 配套计算机或计算板),连接到 客户.可以通过 Wifi 链接或 USB。
# 代码生成
# 依赖关系
必须安装 Fast DDS 2.0.0 或更高版本和 Fast-RTPS-Gen 1.0.4(非更高版本!),才能生成所需的代码,并继续下一步。 按照安装指南进行操作。
# 快速 RTPS(DDS)应用(独立于 ROS)
在编译 PX4-Autopilot 时,会自动生成创建、构建和使用桥接器所需的所有代码。
客户 作为正常构建过程的一部分,应用程序也会编译并内置到固件中。该 代理 必须为目标计算机单独/手动编译。
TIP
大多数用户并不需要这样做。不过,网桥可以 手动生成提供更详细的构建过程概览,有助于排除故障。
# 支持的 uORB 报文
生成的桥接代码将使指定的 uORB 主题子集能够通过 RTPS 发布/订阅,无论您是否部署了 ROS 应用程序。
对于 自动生成代码 有一个 yaml 中的定义文件 PX4-Autopilot/msg/tools/ 名为 uorb_rtps_message_ids.yaml.该文件定义了与 RTPS 一起使用的 uORB 报文集、报文的发送、接收或两者,以及将在 DDS/RTPS 中间件中使用的报文的 RTPS ID。
备注
必须注意的是,每个 RTPS 报文 需要 要在该文件中设置的 ID。
rtps:
- 信息: 已上膛的致动器
本我: 0
- 信息: 致动器控制
本我: 1
- ...
- 信息: 空速
本我: 5
发送: 真
- 信息: 电池状态
本我: 6
发送: 真
- 信息: 摄像头捕捉
本我: 7
- 信息: 摄像机触发器
本我: 8
接收: 真
- ...
- 信息: 传感器_巴罗
本我: 63
接收: 真
发送: 真
# 客户端(PX4/PX4-自动驾驶仪)
客户 作为正常构建流程的一部分,PX4 自动驾驶仪固件会生成、编译并内置源代码。
要为 NuttX/Pixhawk 飞行控制器构建 PX4 自动驾驶仪固件,请使用 _rtps 配置目标中的功能。
例如,为 px4_fmu-v4 构建 RTPS:
生产 PX4_FMU-V4_RTPS
为 SITL 目标构建固件:
生产 px4_sitl_rtps
客户 应用程序可从 NuttShell/系统控制台.命令语法如下所示(可指定不同数量的参数):
>; micrortps_client 启动|停止|地位 [选项]
-t <;运输>; [UART|UDP] 默认 UART -d <;装置>; UART 设备。默认 /dev/ttyACM0 -l <;环路>; 这个程序有多少次迭代?-1 对于 无限。默认值-1。 <;睡眠时间>; 时间 于 毫秒 对于 其中 每次迭代的睡眠时间。默认为 1ms -b <;波特率>; UART 设备波特率。默认值 460800
-p <;poll_ms>; 时间 于 通过 UART 轮询的毫秒数。默认为 1ms -r <;接收端口>; UDP 端口 对于 接收。默认值 2019
-s <;发送端口>; UDP 端口 对于 发送。默认值 2020
-i <;IP 地址>; 选择 IP 地址 (远程) 价值观 <;x.x.x.x>;.默认值: 127.0.0.1
备注
默认情况下 客户 作为守护进程运行,但它不会自动启动,必须手动启动。
PX4 自动驾驶仪固件初始化代码将来可能会自动启动自动驾驶仪。 客户 作为永久守护进程。
例如,为了运行 客户 通过 UDP 连接到代理的 SITL 守护进程:
micrortps_client start -t UDP
# 机外快速 DDS 接口中的代理(独立于 ROS)
代理 代码会自动 生成的 您可以在这里找到源代码: build/<target-platform>/src/modules/micrortps_bridge/micrortps_client/micrortps_agent/.
建立 代理 应用程序,编译代码:
CD 建立/<;目标平台>;/src/modules/micrortps_bridge/micrortps_client/micrortps_agent
mkdir 构建 &&; CD 构建 cmake ..
生产
的命令语法 代理 如下所示:
$ ./micrortps_agent [选项]
-t <;运输>; [UART|UDP] 默认 UART。-d <;装置>; UART 设备。默认为 /dev/ttyACM0。-w <;睡眠时间>; 时间 于 我们 对于 其中 每次迭代的睡眠时间。默认为 1ms。-b <;波特率>; UART 设备波特率。默认值 460800.-p <;poll_ms>; 时间 于 通过 UART 轮询的毫秒数。默认为 1ms。-r <;接收端口>; UDP 端口 对于 接收。默认值 2019.-s <;发送端口>; UDP 端口 对于 发送。默认值 2020.-n <;设置命名空间>; 设置命名空间 对于 微ortps_agent。
要启动 代理运行 micrortps_agent 和适当的选项,用于指定与 客户 (默认选项是从 Linux 设备连接到 客户 通过 UART 端口)。
例如,要启动 micrortps_agent 通过 UDP 连接,问题:
./micrortps_agent -t UDP
# 创建快速 DDS 监听器应用程序
一旦 客户 (飞行控制器上)和 代理 (在车载计算机上)运行并连接、 快速 DDS 应用程序可以使用 RTPS 在 PX4 自动驾驶仪上发布和订阅 uORB 主题。
本例演示了如何创建一个 快速 DDS 监听器" 应用程序,该应用程序会订阅 综合传感器 并打印 PX4 自动驾驶仪发布的更新。连接的 RTPS 应用程序可在与 PX4 自动驾驶仪位于同一网络的任何计算机上运行。 代理.在本例中 代理 和 监听器应用程序 将在同一台计算机上运行。
fastrtpsgen 脚本可用于从 IDL 消息文件生成一个简单的 RTPS 应用程序。
备注
RTPS 报文在 IDL 文件中定义,并使用 fastrtpsgen.
在构建桥接代码时,会为可能发送/接收的 uORB 消息生成 IDL 文件,在创建快速 DDS 应用程序与 PX4 自动驾驶仪通信时需要这些 IDL 文件。
您可以在每个构建目标的以下路径中找到它们: build/BUILDPLATFORM/src/modules/micrortps_bridge/micrortps_agent/idl/*.idl.
输入以下命令创建应用程序:
CD /path/to/PX4/PX4-Autopilot
CD build/px4_sitl_rtps/src/modules/micrortps_bridge
mkdir micrortps_listener
CD micrortps_listener fastrtpsgen -example x64Linux2.6gcc ../micrortps_agent/idl/sensor_combined.idl
这将创建一个基本的订阅者和发布者,以及一个可以运行的主应用程序。
为了打印来自传感器组合主题的数据,请修改以下方法 sensor_combined_Subscriber.cxx:
启动():更改订阅主题名称(默认情况下,micrortps 代理会在命名的主题上发布数据):FMU/SENSOR_COMBED/UT),onNewDataMessage():打印接收到的传感器综合数据。
bool 传感器综合订阅者::启动(订阅者* 字幕)
{
// 创建 RTPSParticipant
参与者属性 PParam;
PParam.rtps.设置名称("Participant_subscriber";); //您可以输入您想要的名称
mp_participant = 域名::创建参与者(PParam);
如果(mp_participant == nullptr)
{
返回 错误;
}
//注册类型
域名::注册类型(mp_participant, 静态投射<;主题数据类型*>;(及样品;我的类型));
// 创建订阅者
订阅者属性 Rparam;
Rparam.主题.topicKind = NO_KEY;
Rparam.主题.topicDataType = 我的类型.获取名称(); //必须在创建用户前注册
Rparam.主题.主题名 = "fmu/sensor_combined/out";;
mp_subscriber = 域名::创建订阅者(mp_participant,Rparam, 静态投射<;订阅者监听器*>;(及样品;m_listener));
如果(mp_subscriber == nullptr)
{
返回 错误;
}
返回 真;
}
空白 传感器综合订阅者::子监听器::onNewDataMessage(订阅者* 字幕)
{
// 获取数据
综合传感器;
如果(字幕->;takeNextData(及样品;站, 及样品;m_info))
{
如果(m_info.样本种类 == 活着)
{
// 在此打印结构数据。
++n_msg;
标准::cout <<; "\n\n\n\n\n\n\n\n\n\n";
标准::cout <<; "收到样本,count="; <<; n_msg <<; 标准::endl;
标准::cout <<; "=============================" <<; 标准::endl;
标准::cout <<; "gyro_rad:"; <<; 站.陀螺仪().于(0);
标准::cout <<; ","; <<; 站.陀螺仪().于(1);
标准::cout <<; ","; <<; 站.陀螺仪().于(2) <<; 标准::endl;
标准::cout <<; "gyro_integral_dt: "; <<; 站.陀螺积分() <<; 标准::endl;
标准::cout <<; "accelerometer_timestamp_relative: "; <<; 站.相对加速度计时间戳() <<; 标准::endl;
标准::cout <<; "accelerometer_m_s2: "; <<; 站.加速度计_m_s2().于(0);
标准::cout <<; ","; <<; 站.加速度计_m_s2().于(1);
标准::cout <<; ","; <<; 站.加速度计_m_s2().于(2) <<; 标准::endl;
标准::cout <<; "accelerometer_integral_dt: "; <<; 站.加速度计积分() <<; 标准::endl;
标准::cout <<; "magnetometer_timestamp_relative: "; <<; 站.磁强计相对时间戳() <<; 标准::endl;
标准::cout <<; "magnetometer_ga: "; <<; 站.磁强计_ga().于(0);
标准::cout <<; ","; <<; 站.磁强计_ga().于(1);
标准::cout <<; ","; <<; 站.磁强计_ga().于(2) <<; 标准::endl;
标准::cout <<; "baro_timestamp_relative: "; <<; 站.相关时间戳() <<; 标准::endl;
标准::cout <<; "baro_alt_meter: "; <<; 站.盐度计() <<; 标准::endl;
标准::cout <<; "baro_temp_celcius: "; <<; 站.温度计() <<; 标准::endl;
}
}
}
在 Linux 上构建并运行应用程序:
生产 -f makefile_x64Linux2.6gcc bin/*/sensor_combined_PublisherSubscriber subscriber
现在,您应该可以看到传感器信息被打印出来:
已收到样品、 计数=10119
接收到的传感器综合数据
=============================
gyro_rad: -0.0103228、 0.0140477, 0.000319406
gyro_integral_dt: 0.004
相对加速度计时间戳: 0
accelerometer_m_s2: -2.82708, -6.34799, -7.41101 accelerometer_integral_dt: 0.004
magnetometer_timestamp_relative: -10210 magnetometer_ga: 0.60171, 0.0405879, -0.040995 baro_timestamp_relative: -17469 baro_alt_meter: 368.647
Baro_temp_celcius: 43.93
备注
确保 客户 运行时,如果 监听器应用程序 不打印任何内容。
# 用真正的硬件设置网桥
本部分正在编写中。
# 故障排除
# 客户端报告所选 UART 端口繁忙
如果所选 UART 端口繁忙,则可能已在使用 MAVLink 应用程序。如果需要同时连接 MAVLink 和 RTPS,则必须将连接转移到另一个端口,或使用 PX4 和配套计算机的可用协议分配器。
TIP
在开发过程中进行桥接测试的快速/临时解决方案是停止 MAVLink 果壳:
mavlink stop-all
# 未构建代理/未找到 ftrpsgen
代理 代码使用 快速 DDS 名为 fastrtpsgen.
如果没有将 Fast DDS 安装在默认路径下,则必须通过设置 fastrtpsgen_dir 环境变量,然后再执行 生产.
在 Linux/Mac 上的操作如下所示:
出口 fastrtpsgen_dir=/path/to/fastrtps/install/folder/bin
备注
如果 快速 DDS 安装在默认位置.
# 在配套计算机上启用 UART
要在 Raspberry Pi 或任何其他配套计算机上进行 UART 传输,必须启用串行端口:
确保
用户名(在 Raspberry Pi 上默认为 pi)是拨出组:组别 pi 苏都 篡改 -a -G dialout pi特别是对于 Raspberry Pi,您需要停止正在使用该端口的 GPIO 串行控制台:
苏都 raspi-config在显示的菜单中,转到 接口选项 > 串行.选择 没有 对于 您希望通过串口访问登录 shell 吗?.有效并重新启动。
检查内核中的 UART:
苏都 vi /boot/config.txt并确保
启用值设置为 1:enable_uart=1