PX4 用户指南(V1.13)
PX4
PX4
网站
(打开新窗口)
支持
自动驾驶仪源代码
(打开新窗口)
文档 源代码
(打开新窗口)
QGroundControl
(打开新窗口)
MAVSDK
(打开新窗口)
MAVLINK
(打开新窗口)
文件
文件
QGroundControl 用户指南
(打开新窗口)
QGroundControl 开发人员指南
(打开新窗口)
MAVLink 指南
(打开新窗口)
MAVSDK
(打开新窗口)
Dronecode 摄像机管理器
(打开新窗口)
支持
版本
版本
主要
(打开新窗口)
v1.14
(打开新窗口)
v1.13
(打开新窗口)
v1.12
(打开新窗口)
v1.11
(打开新窗口)
开发指南(旧版/合并版)
开发指南 v1.11
(打开新窗口)
语言
语言
英语
한국어 (Korean)
中文
#
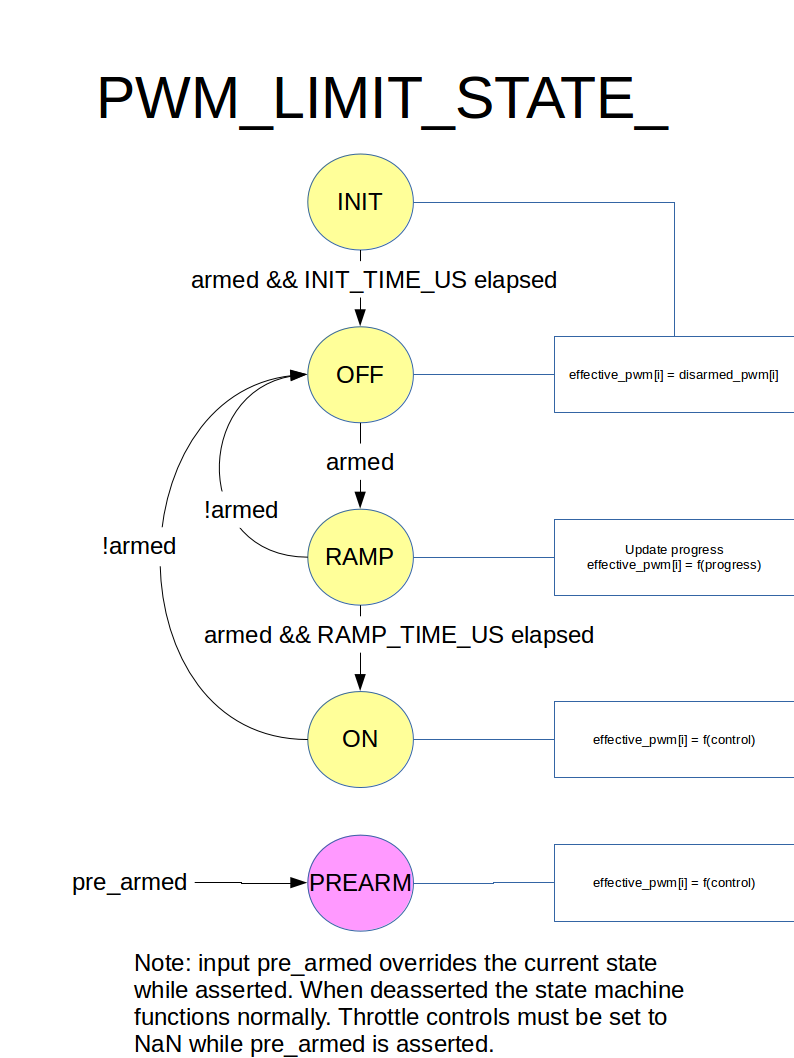
PWM_limit 状态机
[PWM_limit 状态机] 根据预上膛和已上膛输入的函数控制 PWM 输出。在断言 "上膛"和断言上膛信号时节流阀上升之间提供延迟。
#
快速总结
输入
上膛:被断言可使螺旋桨旋转等危险行为成为可能
预上膛:断言启用良性行为,如移动控制面
此输入会覆盖当前状态
无论当前状态如何,断言预置立即强制状态 ON 的行为
解除预上膛后,行为将恢复到当前状态
国家
启动和关闭
pwm 输出设置为解除值。
RAMP
pwm 输出从解除值到最小值的斜坡。
关于
根据控制值设置 pwm 输出。
#
状态转换图
←
几何文件
系统启动
→